|
|
|
|
|


|
|
|
|
|
|
|
|
|
|
|
|
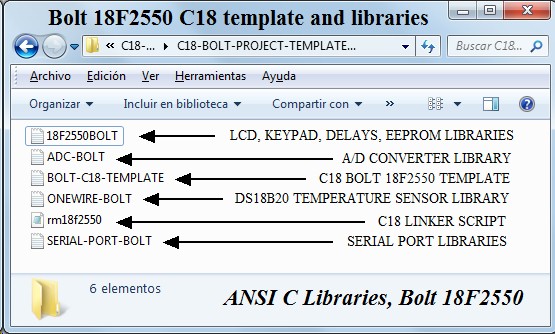
C18 compiler complete list of libraries and functions available for Bolt 18F2550 system:
|
|
Library/function |
Devices/Description |
|
LCD, KEYPAD, DELAYS, EEPROM |
|
| init_bolt( ) | Initializes ports, to use the relay, the LEDs and the microswitches in Bolt. Requires C18 standard library <delays.h> |
| c=microsw( ) | Reads the binary value of the 4 microswitches. Function returns a decimal value from 0...15 and assigns it to the variable c. |
| InitLCD( ); | Sends commands to initialize the LCD. The cursor is set to position (0,0). |
| ClearScreen( ); | All 16 cells in LCD are blank. |
| GotoXY(1,5); | Positions cursor in row 1, cell 5 of LCD |
| PrintString(wob); | The function accepts a string as parameter, in this example named "wob". Write on LCD string content. Maximum 8 characters. |
| PutLCD('*'); | Writes to LCD the indicated character in position where the cursor is. |
| PutLCD(53); | Writes to LCD ASCII code of number 5 (decimal value is 53) |
| PutLCD(x); | Writes to LCD, the value of variable x (x must be an ASCII code) |
| delay_us(100); | Delay of 100 microseconds. Value between 0...255. Must include <delays.h> |
| delay_ms(100); | Delay of 100 miliseconds. Value must be between 0...30,000. Must include <delays.h> |
|
w=GetBot( ); |
Waits fot a key stroke. Function returns value of ASCII code of key pressed and assigns it to variable w. |
|
SetBot( ); |
Gets up to 7 characters from keypad and accommodates them as a string in an array named always "bot[ ]", which is already defined in this function as global. If user enter fewer than seven characters, must end with "F". Sends Echo to LCD after each keystroke. |
| WrtBot( ); | This function complements the previous one. Writes on the LCD, starting at the position where the cursor is, the string contained in the array "bot[ ]", defined in this function as global. |
| writeeeprom(60,BOR); | Writes to the EEPROM at the address 60, the contents of the variable "BOR". Valid addresses and data values must be between (0...255). |
| BOR=readeeprom(2); |
Reads the contents of the address 2 in EEPROM, and assigns it to the variable "BOR". Valid addresses and data must be between values (0...255). |
|
A/D CONVERTER |
|
| open_bolt_adc( ); | Initializes Channel 4 of A/D converter in Bolt system. Requires C18 standard library <adc.h> |
| z=bolt_adc( ); | Function performs 10 bit A/D conversion on Channel 4 (pin RA5 of 18F2550), returns a decimal integer from 0...1023 assigned to variable z. At the end of the conversion, it disables the converter A/D. The analog signal must have a range of 0...5 volts and must enter the Bolt module through its auxiliary port on pin 2. |
|
SERIAL PORT |
|
| activa_serial( ); | Initializes the serial port. The speed is 9600 bps, 8 data bits. Requires library <usart.h> |
| z=timed_getc( ); | Function with timeout. Wait for a character in the receive buffer for 100 ms and returns. If no data, z=0. If a character is received, z takes the value of data. User may change the timeout from 100 ms to any other value. |
| z=getcNOECO( ); | Reads a character from the serial port. Value is assigned to the variable z. No Echo. |
| z=getcECO( ); | Reads a character from the serial port. Value is assigned to the variable z. Sends Echo. |
| getsUSART(ray,13); | Waits and reads 13 characters from the serial port, and acomodates them in the array named "ray". There is no Echo nor timeout. Must include C18 standard function <usart.h> |
| putsUSART(x) | C18 standard library. Sends the string stored in the array x. Requires <usart.h> |
| putcUSART(65); putcUSART(wobi); putcUSART('A'); |
3 ways to send an ASCII character through the serial port. C18 standard function. <usart.h> |
|
DS18B20 TEMPERATURE SENSOR |
|
| z=ds1820_read( ) | z must be defined previously as a floating point variable. The function returns the value of the temperature in degrees Celsius, read from sensor DS18B20, as 2 whole values and 1 decimal. |
|
C18 COMPILER ANSI C STANDARD (please see manual for complete list) |
|
| putsUSART(x) | C18 standard library. Sends the string stored in the array x. <usart.h> |
| getsUSART(ray,13); | Waits and reads 13 characters from the serial port, and acomodates them in the array previously defined as ray. There is no Echo nor timeout. Must include C18 standard function <usart.h> |
| putcUSART(65); putcUSART(wobi); putcUSART('A'); | 3 ways to send an ASCII character through the serial port. C18 standard function. <usart.h> |
| printf( ); | Sends through serial port, a string with the specified format. This is a function of multiple formats. Please see more information of printf( ) in C18 manual. Important: in C18 this function handles only integer signed or unsigned variables. <stdio.h>. |
|
y=atoi(ray); y=atol(ray); |
converts the string stored in the array previously defined as "ray" to an integer of the type "int" or "long int". <stdlib.h>. |
| z=atof(ray); | converts the string stored in the array "ray" to a floating point value. <stdlib.h> |
| sprintf(ray,"%u",a); sprintf(ray,"%lu",a); sprintf(ray,"%3d",a); | converts the variable "a", which may be floating point (f), integer (u), long integer (lu), decimal (d), to a string that is stored in the array called "ray". This function is used to prepare a string which is then sent to the LCD display. The format is similar to that used in printf( ). In C18 this function handles only integer signed or unsigned variables <stdio.h> |
| LEN=strlen(wob); | LEN variable takes the value of the length of the string "wob". <string.h> |
| strcpy(leo,"AMIGOS"); |
stores in the array "leo" a string with the given text, in this case "AMIGOS". To use this function you must include <string.h> |
|
>>>>>>> |
Download All C18-Bolt-Template-and-Libraries-in-one-single-file.zip ! |
|
Folder with complete set of template and libraries for Bolt 18F2550 system |
|