|
|
|
|
|



|
|
|
|
|
|
|
|
|
|
|
Control de activación y dirección de giro de un motor de corriente directa.Proyecto realizado por Moisés Rafael Gutiérrez Damián para Punto Flotante, S.A.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Control de activación y dirección de giro de un motor de corriente directa.Proyecto realizado por Moisés Rafael Gutiérrez Damián para Punto Flotante, S.A.
|
|
|
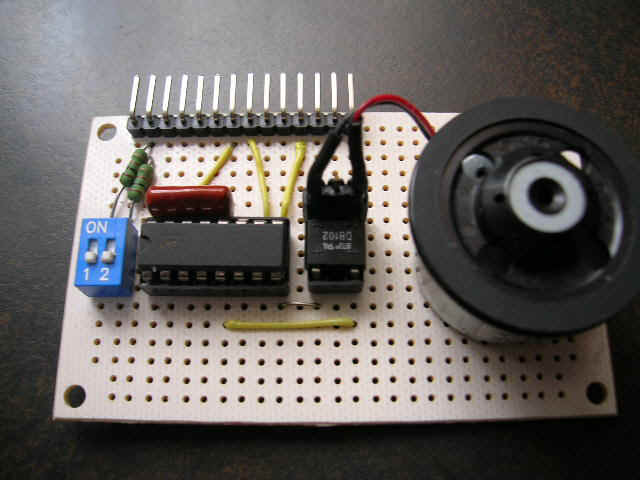
Descripción: Se describe un circuito de experimentación sencillo y barato, y su firmware para el microcontrolador EDUPIC 16F628 ó EVOLUPIC Bootloader 16F88, el cual controla el movimiento de un motor de corriente directa a través de 2 microswitches. El switch S2 controla la activación ó desactivación del motor, y el switch S1 controla la dirección de giro. El circuito se conecta al puerto de 14 pines para LCD de EDUPIC ó EVOLUPIC, pero puede conectarse a cualquier otro sistema de microcontrol haciendo modificaciones mínimas. Las funciones del firmware en el 16F628/F88 son leer el estado en que se encuentran los 2 switches y generar las señales que habrán de controlar el movimiento del motor. Se utilizan solamente componentes baratas y fácilmente asequibles en las calles de República del Salvador del Centro de la Ciudad de México. El driver para motor L293B cuesta alrededor de 20 pesos, el puente rectificador de diodos DB102, 5 pesos y el motorcito de corriente directa alrededor de 30 pesos.
|
| El circuito
proporciona un punto de inicio para futuras variantes al proyecto inicialmente para
realizar medición de velocidad de giro y posteriormente el uso de algoritmos de control
proporcional para establecer la velocidad en un setpoint. Asimismo, este sencillo circuito
permite realizar experimentación y emular controles de motores de mayor capacidad. También es posible utilizar el circuito para aplicaciones de robótica de hobbistas, ya que se tienen los elementos básicos para controlar el movimiento de las ruedas de un dispositivo seguidor de línea y otras aplicaciones. Los switches manuales 1 y 2 del circuito pueden, en variantes del proyecto, ser reemplazados por sensores de proximidad, sensores lumínicos o switches electrónicos de control remoto. El programa de control es el siguiente:
El diagrama electrónico del circuito es el siguiente: Use como referencia para realizar las conexiones el siguiente documento: Puertos y conectores en Sistema EB88. NOTA IMPORTANTE: Si usa el software WINPIC, para evitar errores en el software de programación, debe insertarse la tarjeta del circuito del motor al puerto LCD del sistema EDUPIC ó EVOLUPIC, hasta después de que éste ya haya sido programado, ya que las señales RB6 y RB7 son usadas tanto por el programador WINPIC como por el 16F628 para controlar el motor.
|
|
|
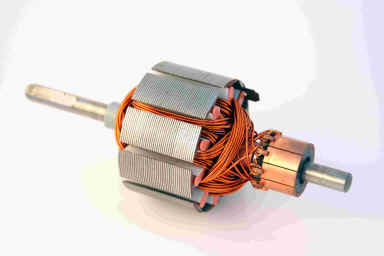
PRINCIPIOS DE FUNCIONAMIENTO: Típicamente, el rotor de un motor de corriente directa, también conocido como "armadura", tiene enrollamientos de alambre terminados en contactos de conmutación. En la foto pueden verse los segmentos de conmutación metálicos, mediante los cuales se proporciona energía al rotor. El estator es el cilindro que cubre al rotor y que cuenta con 2 ó más imanes permanentes. La polaridad opuesta en los enrollamientos energizados en el rotor y los imanes del estator, crean el movimiento de rotación. A través de la conmutación en los segmentos metálicos del rotor, se cambia en forma constante la polaridad, de tal manera de conservar el movimiento. |
|
|
EL PUENTE H: Así se le conoce por su forma parecida a la letra H. Básicamente es el circuito electrónico que permite invertir el sentido de la corriente directa en el motor, invirtiendo de esta forma su dirección de giro. Los switches que se muestran en el diagrama esquemático simplificado, son en realidad compuertas electrónicas FET que abren y cierran los contactos. Con los bits 1 y 2 cerrados, y 0 y 3 abiertos, circula corriente en una dirección. Para invertir el sentido, se cierran 0 y 3 y se abren 1 y 2. La función de este puente es realizada, en el proyecto descrito aquí (el cual usa un motor alimentado con 5 volts), por los circuitos del controlador L293B junto con el puente rectificador de diodos DB102. El microcontrolador 16F628 usa los bits RB6 y RB7 para controlar tanto la activación del motor como su dirección de giro. |
![]()