|
Control
de la velocidad y sentido de giro de motores de corriente directa empleando PWM.

Video demostrativo
|
1. Descripción general:
Para el control de velocidad de
motores de corriente directa se utiliza en general la
técnica conocida como PWM ó 'Pulse Wide Modulation'. El
método consiste en el switcheo rápido (alrededor de 20 khz)
de la fuente de alimentación del motor, proporcionando a
éste una potencia promedio controlada mediante el ancho de
los pulsos.
Para tal fin, se utiliza típicamente
un módulo especializado controlador de PWM, el cual a su vez
es operado mediante un sistema microcontrolador.
Adicionalmente, estos módulos
permiten también cambiar la dirección de giro del motor, por
medio de un circuito conocido como 'Puente H' (ver punto 4).
|
|
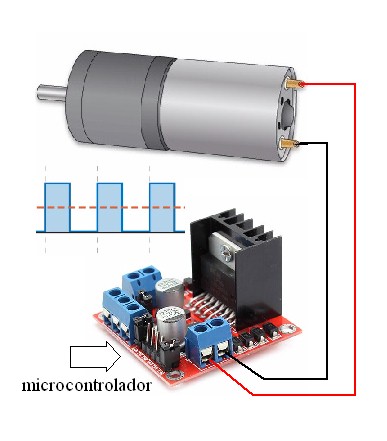
2. La modulación
por ancho del pulso (PWM):
El sistema
microcontrolador envía al módulo PWM formas de onda como las
mostradas en la imagen, las cuales se traducen en el
switcheo de la fuente principal de alimentación del motor.
El voltaje de alimentación de esta fuente es típicamente
entre 6 a 12 volts.
La frecuencia del switcheo, como
se mencionó antes, es de alrededor de 20 Khz. El propósito
es enviar al motor una potencia promedio, la cual se
incrementa conforme el ancho de los pulsos es mayor. El
parámetro conocido como 'ciclo de trabajo' es un porcentaje
que indica la proporción entre el tiempo que se entrega
potencia al motor dividido entre el tiempo de cero voltaje.
Por ejemplo, un ciclo de
trabajo del 10% hará que el motor se mueva muy lentamente.
Un ciclo de 90% lo hará girar casi a su máxima velocidad. |
|
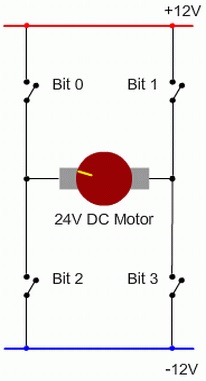
3. Control del sentido de giro del motor:
El control del sentido de giro se realiza por medio de un
circuito conocido como 'Puente H', el cual está ya integrado
al controlador PWM. Así
se le conoce por su forma parecida a la letra H.
Básicamente es un circuito electrónico que permite invertir
el sentido de la corriente directa en el motor, cambiando de
esta forma su dirección de giro.
Los
switches que se muestran en el diagrama esquemático
simplificado mostrado en la figura, son en realidad
compuertas electrónicas FET que abren y cierran los
contactos. Con los bits 1 y 2 cerrados, y 0 y 3 abiertos,
circula corriente en una dirección. Para invertir el
sentido, se cierran 0 y 3 y se abren 1 y 2.
|
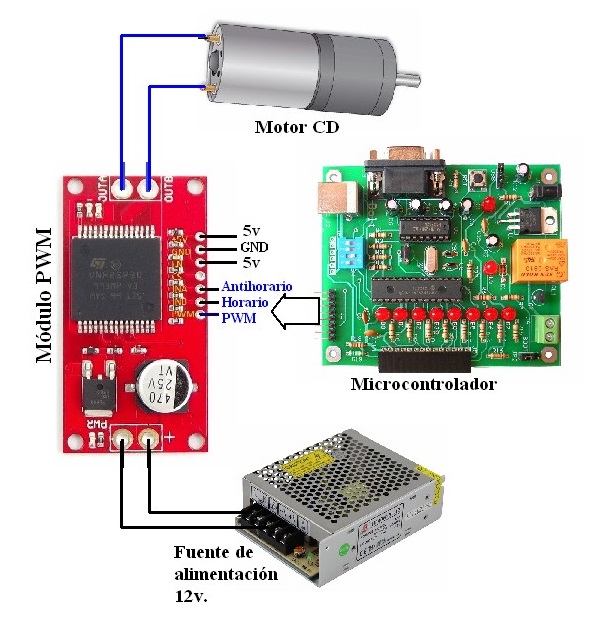
4. El módulo de control PWM:
En la figura abajo se muestra un módulo PWM
de número VNH2SP30
y el cual por su simpleza es muy utilizado comercialmente. El módulo
requiere de una fuente de alimentación con voltaje y corriente de
salida especificadas de acuerdo al motor. Por ejemplo, en una
aplicación típica, la fuente proporciona 12 volts a 5 amperes (60
watts) para un
motor como el descrito aquí.
La salida PWM de alimentación del motor se
muestra en líneas azules. El microcontrolador controla la velocidad
y el sentido de giro por medio de 3 señales: sentido horario,
sentido antihorario y la señal PWM con un cierto ciclo de trabajo,
como se explicó en el punto 2.
.
Documentación adicional:
Fuente conmutada de 12 volts
Hoja de datos driver VNH2SP30.pdf
Driver Dual PWM L298N
Puente H para control de velocidad
Driver
VNH2SP30 PWM para motores de alta potencia
Motor CD Alto Torque
y encoder
Motor
Motorreductor CD con encoder
Lectura de velocidad de giro de un motor CD con encoder
Lectura de velocidad de un motor de alto torque, con encoder
Control PWM
para motor de CD, con módulo L298N
Control de velocidad PWM para motor GW4058 de alto torque
Principios de funcionamiento del encoder cuadratura de efecto Hall
|


